
The ship manoeuvring simulator comprises various components. There is firstly the mathematical model. This is the calculating core behind vessel motions. Different forces act upon a sailing vessel: forces generated by the movement of the vessel through the displaced water, by wind, current, waves and other passing vessels.
Secondly, the simulator has a navigation bridge. From the instruments, the radar and the exterior view through the windows of the simulated bridge, the captain or pilot can see how the vessel behaves. With adaptive commands (rudder(s), telegraph, tugboat assistance) he/ she steers the vessel. Dependent on these commands, the interaction of forces on the vessel can be calculated. From this, the speed and the new position of the vessel is calculated and displayed on instruments and radar. In this manner, manoeuvring is simulated as realistically as possible.
Flanders Hydraulics has three complete bridge simulators:
LARA: Inland navigation simulator:
- Bridge with 210° aerial view displayed on seven 52" LCD monitors
- Equipped with ECDIS and radar
- Controllable camera views
- Controllable bridge height as on many inland vessels
- View vertical down (Manoeuvres close to a wall or lock)
- Command section as conventional vessel or Voith (tug boats)

Simulator SIM 225:
- Bridge with 225° aerial view
- Augmented rear view provided by four 85" screens
- PPU (Portable Pilot Unit) with integrated QASTOR application
- Command section as conventional vessel or Voith (tug boats)

Simulator SIM 360+:
- Bridge with 360° aerial view
- PPU (Portable Pilot Unit) with integrated QASTOR application
- View vertical down (Manoeuvres close to a wall or lock)
- Command section as conventional vessel or Voith (tug boats)

Mathematical model
The most important component of the simulator is the mathematical model. On the one hand, it predicts the effect of external forces acting upon the vessel and on the other hand, the hydrodynamic forces acting on the vessel's hull, rudder and propeller.
The mass and all forces acting upon the vessel are calculated five times per second. The new position, speed and course of the vessel are derived from this. At this new position, all the forces are calculated anew for a next time step. From these calculations again the position, speed and course of the vessel can be derived allowing the vessel to continue to sail up to the end of the manoeuvre.
Ship's bridge
The ship's bridge is equipped with the necessary instruments and control devices for the steering of the various types of vessels (e.g. container ship, cruise ship, tugboat etc.).
Instructor area

The exercise conditions (ships, place, current, wind etc.) can be set up in the instructor area. It is also possible to set the atmospheric conditions of the exterior view. These can range from a very calm sea with a haze up to rough storm conditions.
The instructor controls the movement of other vessels and can thus stimulate the navigator on the bridge to anticipate this. The instructor also operates tugboat assistance requested for, bridges, lock chambers and ship traffic lights.
Exterior view
The exterior view is a display of the surroundings visible from the ship's bridge up to a distance of some 10 kilometres on both sides of the waterway. The time for creating an exterior view can be estimated to be approx. 30 to 40 working days, but it strongly depends on the extend and the detailing of the surroundings to be displayed.The first task when creating an exterior view is to explore and to photograph the environment; the objective of this will be clarified later.
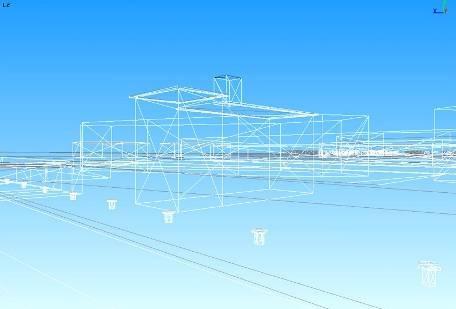
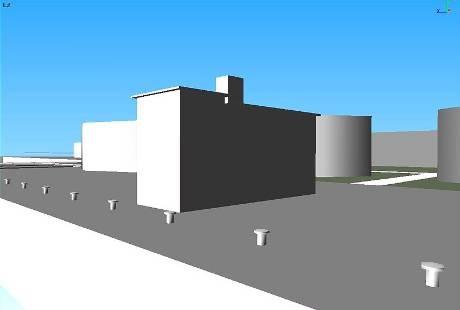
After the on site work, the design phase follows. One starts with making a wire frame model. Angles, lines and surfaces are added at the correct height in order to obtain a threedimensional representation of the surroundings. The wireframe model must still be clad. This can be accomplished through colouring the different surfaces. Finally, parts of the photos of the area are draped as a layer over the wireframe model. The buildings are finished similar to as they are in reality.
Later, target ships are also inserted which will meet the own vessel controlled on the bridge during the simulation. Finally animations such as smoke, undulating water, weather conditions, indicating lights, ambient sound etc. are added to the exterior view.
|
|

|
Waves and ship motions at sea
The waves and the motions of seagoing vessels are represented very realistically in the simulators. Waves at sea are irregular in nature and as a consequence the motion of a ship in reaction to the waves is also irregular. The waves are not random, however, and spectral analysis gives information on the characteristics of waves. When you combine a wave spectrum with a so-called RAO of a ship, which basically tells you how a ship will move in response to regular waves of different frequencies, response spectra of the different motions of the ship can be derived. In addition, RAO’s for second order drift forces are defined in the simulator. These horizontal forces and moment contribute to the mathematical manoeuvring model of the simulator.

Spectral waves and RAO based ship responses were recently added to the simulators of Flanders Hydraulics. Together with the Maritime Technology Division at Ghent University, a state-of-the-art code library was developed in the CUDA programming language to perform all the wave calculations on Graphic Processing Units (GPU). Spectral wave calculations are particularly suitable to benefit from the massively parallel architecture of GPUs. The newly developed library achieves very high performance, leading to the synthesis of realistic sea states in real time, which is of course very important for ship manoeuvring simulators. The new library uses a multi-band Fast Fourier Transform approach to synthesize ocean waves in both deep and shallow water. A Discrete Fourier Transform is applied to the response spectra to calculate ship responses in the time domain. The code can deal with regular waves, theoretical wave spectra (e.g. a JONSWAP spectrum which is typical for the North Sea) and custom wave spectra like the ones obtained from wave measuring buoys.
The code can represent time and space varying wave conditions. The definition of multi-band wavenumber spectra is flexible, and it allows to increase the size or the number of bands when more computational power becomes available. At the moment, the library is being used in real time with three 512x512 wavenumber spectra, leading to a total of ~800 000 elementary harmonic waves being represented. The library calculates the sea surface elevation, the sea surface normal direction and the Jacobian of the sea surface which is used to calculate a foam factor. For each of the above quantities, the new CUDA library can fill in a texture that can be used to visualize a realistic ocean surface by an OpenGL 3D application. Moreover, the new library uses the choppy sea approach to stretch the harmonic waves in space and visualize more realistic looking trochoid waves. The choppiness parameter, which is usually estimated empirically as a global constant, is instead calculated based on the physical properties of each elementary wave.
This advanced representation of the waves and motions of ships allows to simulate manoeuvres at sea as realistically as possible and can be used, for example, to evaluate the navigability of different ship types in the fairways at the Belgian coast.
Sample videos of the stunning realism that is obtained can be found on our YouTube channel.