The development of autonomous navigation has been a hot topic over the past years. A lot of research effort has been put into implementing hardware (sensors, detection mechanisms, …) and the legislative aspects that are involved.
In contrast, the hydrodynamic aspects have been receiving less attention. Sailing at a certain speed on a straight course may be relatively straightforward, but as soon as a ship is sailing in a shallow or confined environment, the hydrodynamic interaction effects will affect the motion of the vessel and any autonomous system needs to be able to cope with that. Similarly, when other floating objects are approached, interaction effects need be taken into account.
In order to optimize the track controller that was in use at Flanders Hydraulics and Ghent University, intelligent and advanced control strategies were taken into account. Apart from the classic PID control theory, fast time simulation track controllers can be based on fuzzy adaptive logic control, neural network control, and other more advanced or sophisticated tracking control algorithms.
The developed track controller was validated by means of model tests in the Towing Tank for Manoeuvres in Shallow Water (FH), and was applied in the fast time simulator. The control algorithms are also applicable for the control of autonomous navigation.
The applicability of the available controllers is now being extended towards more complex situations where:
- ship - ship interaction effects occur, e.g. meeting and overtaking manoeuvres, passing moored vessels and ship-tug interaction;
- thruster and/or tug assistance is required, typically in port environments, e.g. berthing, lock entrance, turning manoeuvres;
- shallow water effects or bank effects occur, e.g. in shallow or confined environments.
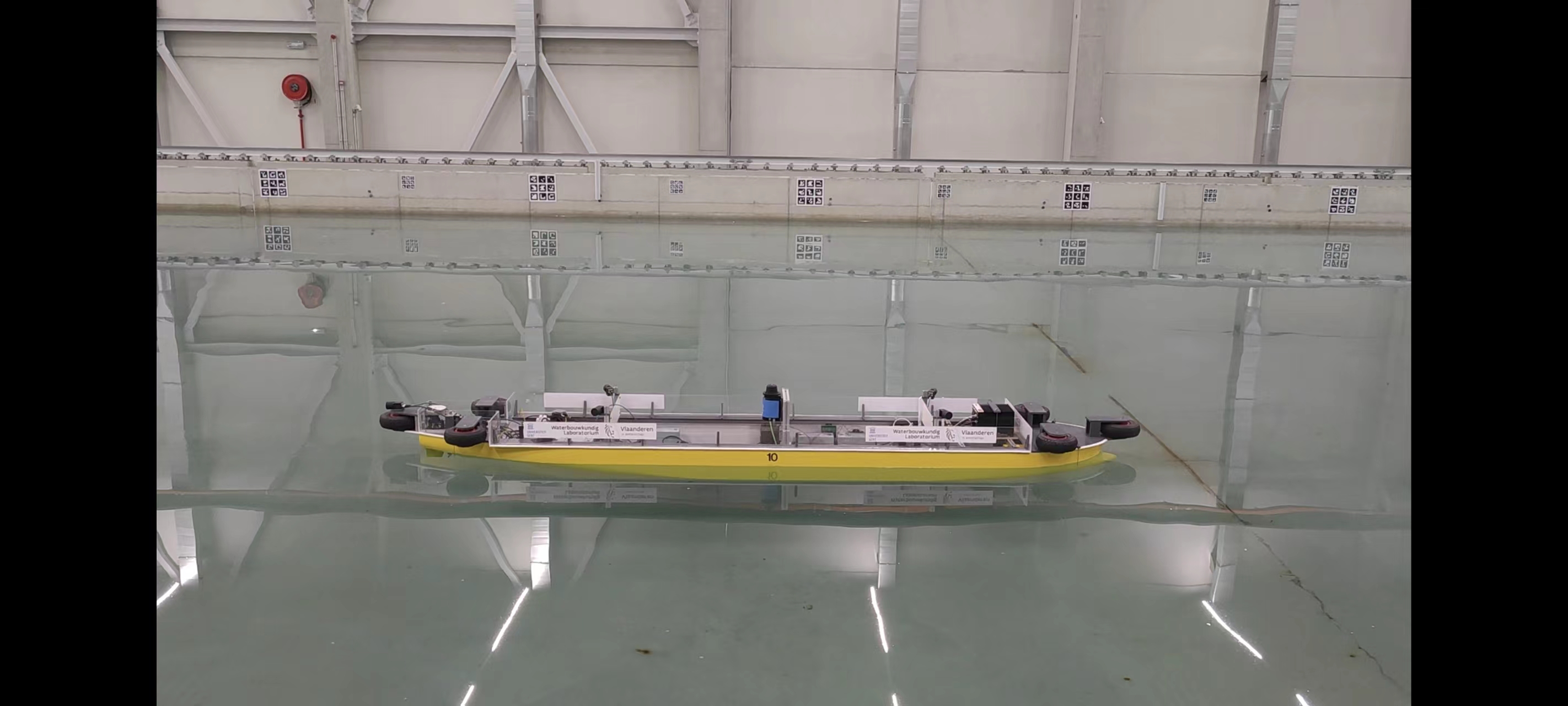
In order to do so, new state-of-the-art control techniques are being considered, developed and then tested by free running experiments, which are being carried out in the Towing Tank for Manoeuvres in Shallow Water in Ostend. With the new free running control system that is installed, tests with multiple ships of different sizes (between 4 and 8 m long) are being carried out.
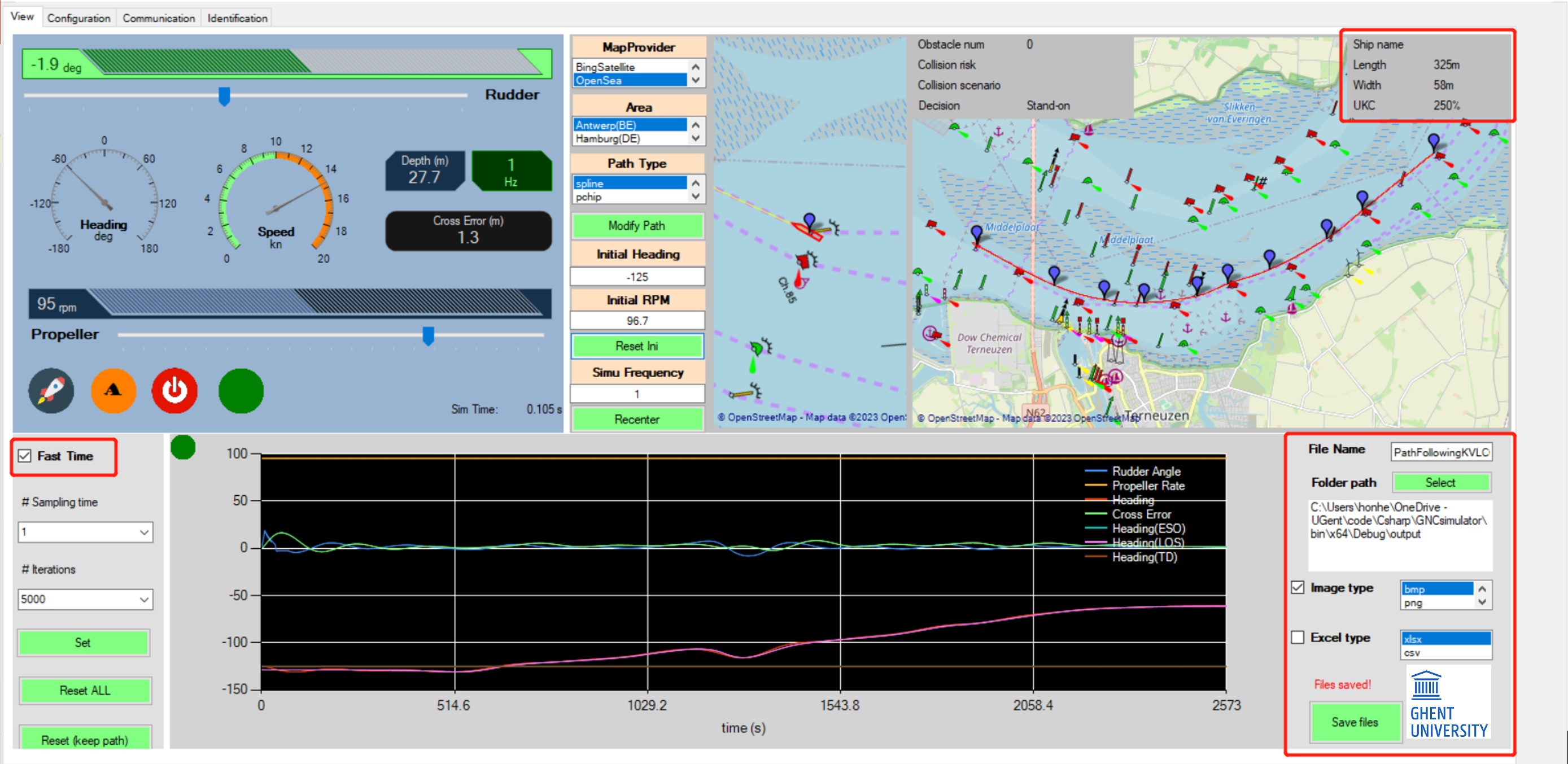
Flanders Hydraulics (FH) has several full mission bridge simulators specifically devoted to ship manoeuvring in shallow and confined water. At the heart of the simulators, mathematical manoeuvring models account for the forces related to shallow water, banks, ship - ship interactions, locks, waves, wind and current and nautical bottom. The simulators can now also serve as a virtual test bed for autonomous navigation by interfacing (third-party) controllers via an Application Programming Interface. SimAPI is a .NET interface developed by FH that allows external applications to set up a simulation and take full control on the ship and the environment. By using SimAPI, an external client application can fully interact with the manoeuvring models of FH, providing control values and receiving the updated dynamic state of the ship. The dynamic state of the ship which is shared through SimAPI, includes the ship’s position and velocity in six degrees of freedom, as well as the state of controllable ship components, like the propeller number of revolutions and the rudder angle. In addition, the dynamic state also includes parameters related to the environment such as water depth, current and wind condition.
SimAPI is also very flexible so that it can work easily with third party controllers. The interface is not bound to the time step of the simulators. The pace of the simulation, the frequency of control updates and the length of simulation blocks can be set arbitrarily to achieve the desired interaction between client code and the manoeuvring models behind the simulators of FH.

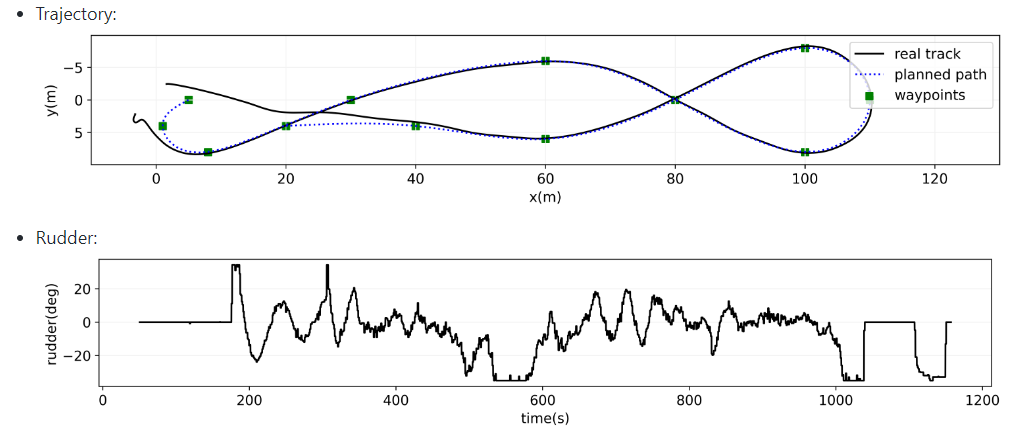
Researchers at the Maritime Technology Division at Ghent University were the first to integrate SimAPI in a front-end application, called ‘SimAutoPilot’, which provides different autonomous control algorithms to steer a ship on a track. The steering decisions of the front-end provide the rudder angle and propeller rate via SimAPI to the simulators. SimAPI then returns the ship motions which are determined by the advanced manoeuvring in conjunction with the environmental conditions. In the example shown here, a tanker sails in a waterway under the control of a Model Predictive Control path follower. This predictive model utilized in MPC is an identified ship model rather than the manoeuvring model in the simulator. Another demonstration showing a test of automated collision avoidance compliant with COLREGs can be seen via https://youtu.be/6Wkcq2uELDY.